
Omninado
Omnidirectional and omni-purpose robot built on ROS 2
30th July to 1st August 2025: Complete 3D Model
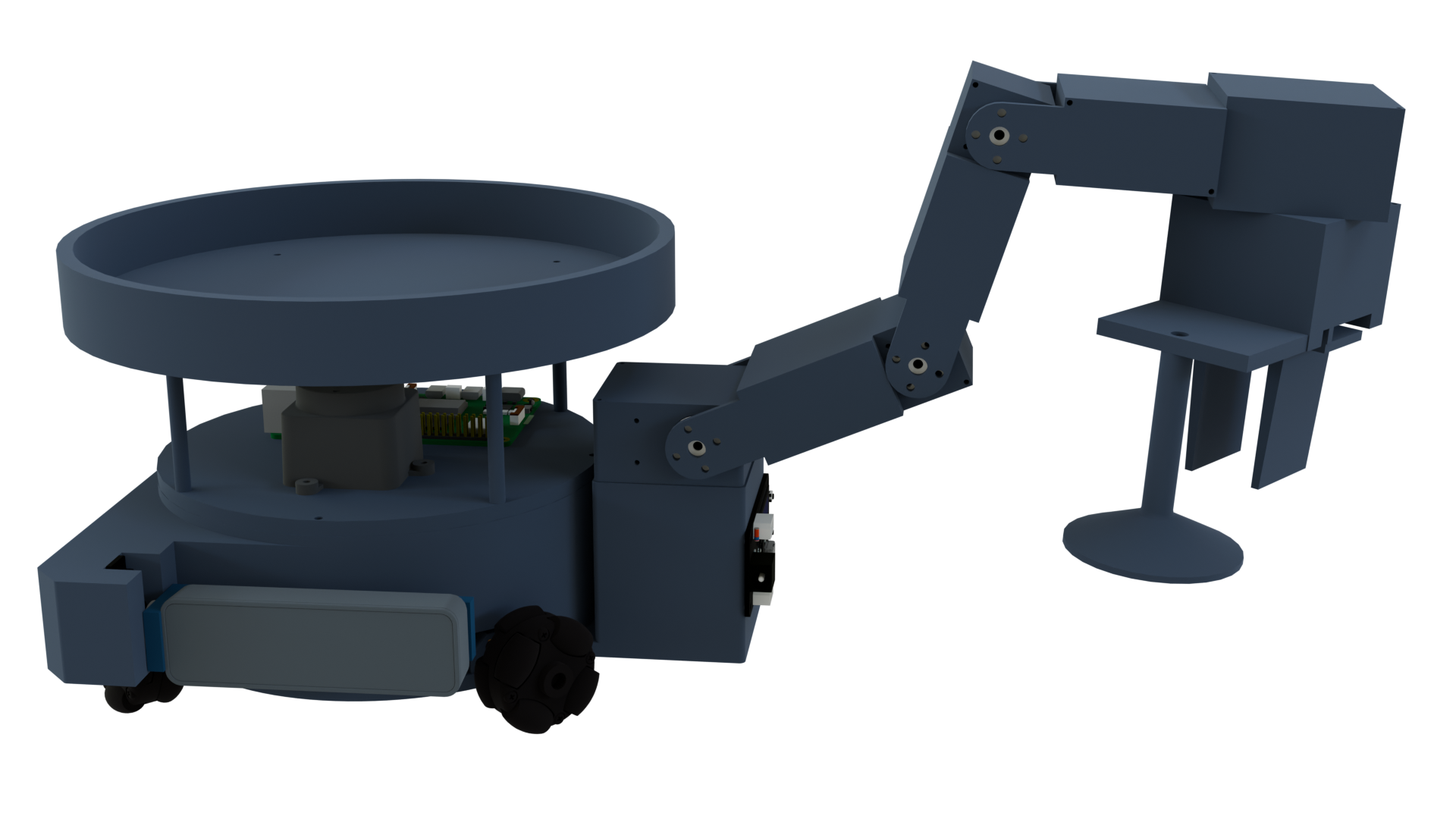
I spent these 3 days completing the 3D model of my robot, it is now ready for its first print.
I have added ways to mount everything needed (motors, omni wheels, motor driver, rotatable depth camera, lidar, raspberry pi 5).
I also added a roof to the robot to make it easy to pick the robot up and for the roof to also act as a place for the robot to keep items it picks up.
Updates Regarding Related Projects
- I spent a lot of time on the robot arm to be used for this robot (Omni Arm) and it is also ready for its first print.
- The
omni_wheel_drive_controllerhas been merged intoros2_controllers.
Total time spent: 20h
5th July 2025: Added velocity limits - cmdvelcontroller
There were no updates for a while as I was working on various things that will be used in this project. Here is a list:
- ESP32-S3 6 Motor Driver with IMU: This is the microcontroller shown in the Movement Control Diagram.
- ESP32-S3 6 Motor Driver with IMU - Library
- multiomniwheeldrivecontroller
- cmdvelcontroller
{kind=link}
I made an update today as I have added velocity limits to the robot. This is a part of the cmdvelcontroller as shown in the Movement Control Diagram.
Total time spent: 1h
18th June 2025: Created Movement Control Diagram
Today I created a diagram showing how the movement of the robot will be controlled.
 |
|---|
| Movement Control Diagram |
Total time spent: 1.5h
12th June 2025: Got Basic Simulation Working
Today I did the following things:
- Created the 3D model of the base of the robot.
- Wrote the ROS robot description.
- Created the packages and launch scripts necessary to get the robot simulated in Gazebo.
- Configured ros2_control to get the robot moving in simulation, I used the multiomniwheeldrivecontroller that I made in the past.
- Wrote some documentation.
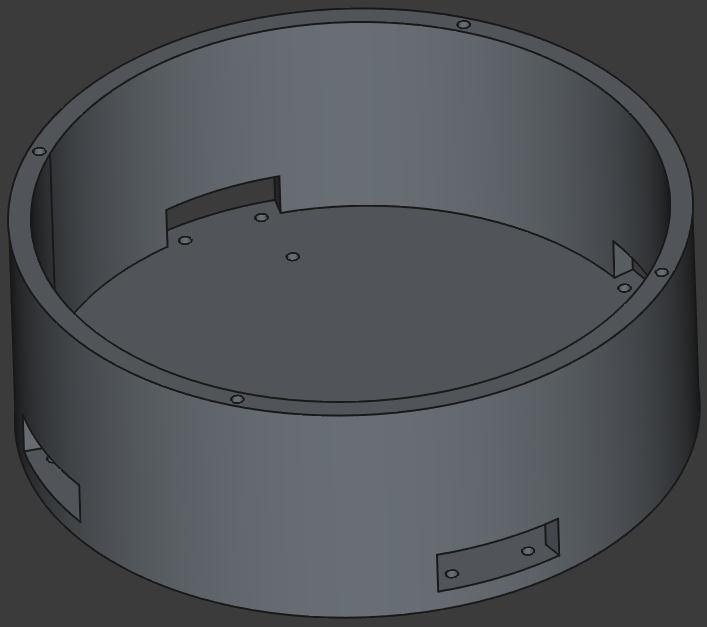 |
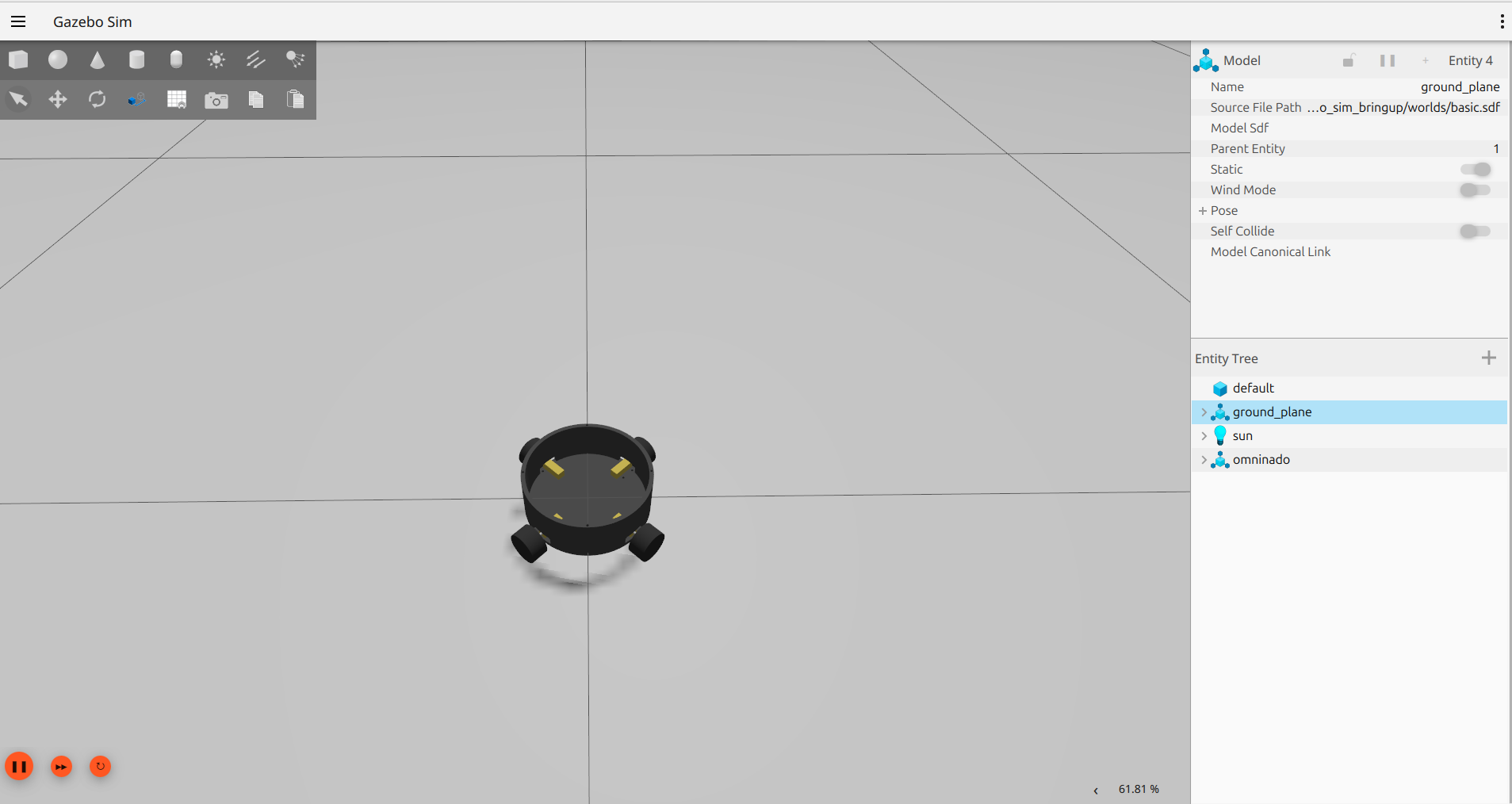 |
|---|---|
| 3D Model of Base | Robot in Gazebo Simulation |
Total time spent: 8.5h