
Andytracker
Total Time: ~20hr
June 3rd: (Essentially) completed fusion model
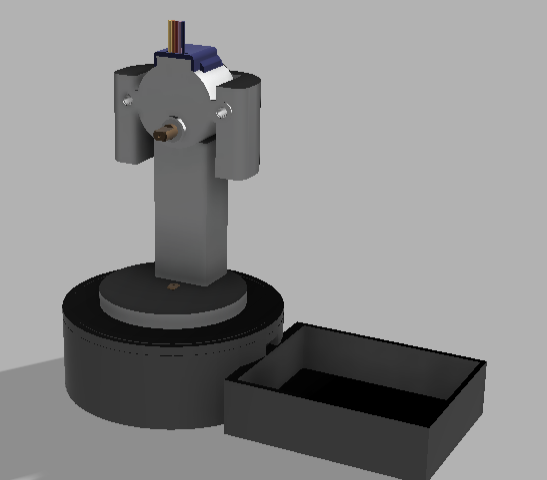
I began work on the project, taking inspiration from a couple of exisitng 2 axis gimbals.
I built a two axis gimbal using the smaller blue stepper motors, as steppers are much much smoother to run than servoes
One stepper will be used for the pan axis(the bottom one, just pointing at his longitude and latitude) while the other stepper will be
I built this in Fusion360
Time Spent: 7.5hrs(wayy too many design iterations)
June 4th: PCB Design
I began work on the PCB - this PCB was supposed to be pretty straightforward w/ the a4988 module but I believe the ULN2003 module is a better choice for us - as it has a neat little point for us to plug in our stepper cable
I'm also adding another thing - a GPS module which would let me just place this thing anywhere and have it point at Andy sir
@ttf-fog is currently working on the code for this, and it should be ready by tommorrow - we setup his tracking with Traccar, which provides an easy to use api which gives his longitude and latitude (straight up)
Here is an example of the traccar page

Time Spent: 4.5hrs
June 5th: Updated PCB and 3D Scan
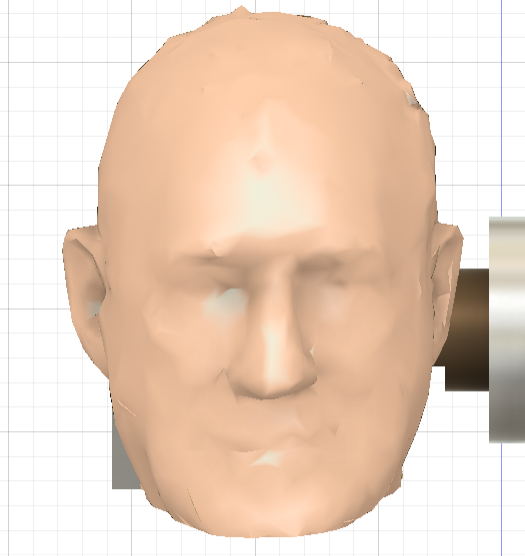
We scanned Andy sir's head and added it to the tip of our pointer thing.
Additionally, I realized that a nano would be pretty much useless as we need to pull the location from an API, so I switched the nano on the PCB to an ESP-32
Apart from that, I spent a long time looking into using nema-17s or servo motors instead, but I think that would be overkill for our(admittedly silly purposes)
@ttf-fog worked on the code, and will push it soon
Time Spent: 3hr
June 10th
forgot about this and just worked on readme today, along with shipping the project yay!!!
also @ttf-fog kinda dissapeared on vacaction lmao so this isnt a grp project anymore xD
Time Spent: 1hr
June 10th - Pt2
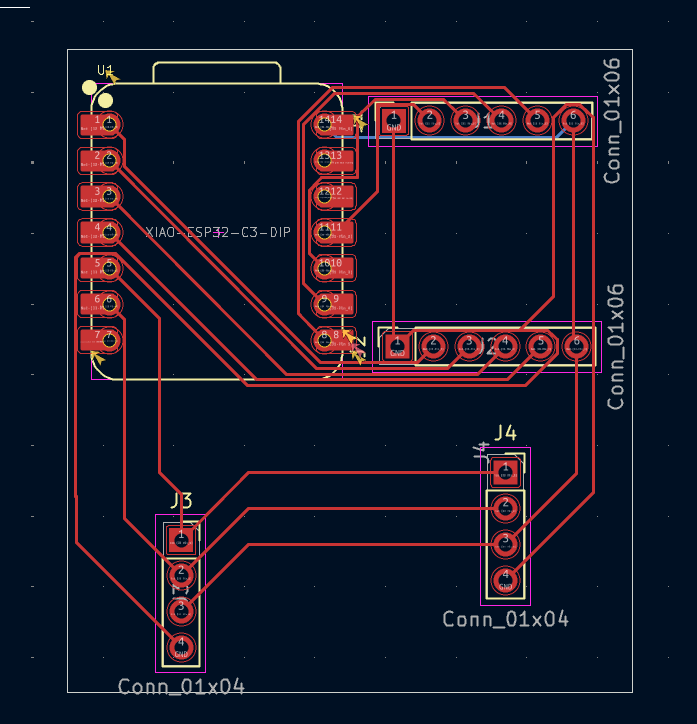
Redesigned the entire PCB for the xiao esp32 c3
Pretty much nothing else, as the xiao was chosen due to its 10x reliability( recently had a week-long traumatic experience with an esp32 devkit)
Also, pushed the code today. It is an ESP32 sketch that fetches live GPS coordinates of andyphone from Traccar, calculates its azimuth and elevation from the GPS modules location, and drives two stepper motors to point toward it.
It uses Wi-Fi, HTTP requests, JSON parsing, and simple spherical trig to orient our pan and tilt platform
 Time Spent: 4hr
Time Spent: 4hr