
Spooderbot
Total across 3 days - 20.5h
May 30th: Started Fusion Design
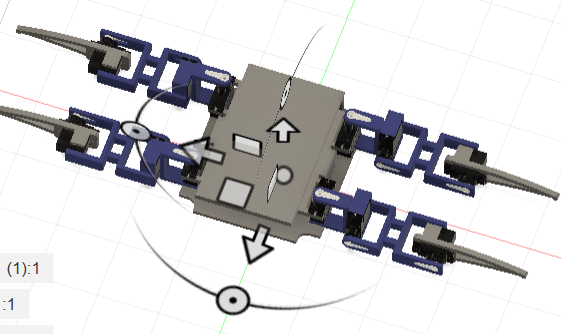
Started on the 3D model of the Spider
Decided on a quadraped(for now) and designed a 3dof leg
This leg is around 160 mm long, and I intend to use MG90 servos as SG90s just suck(MG90s still kinda suck, but atleast they suck less)
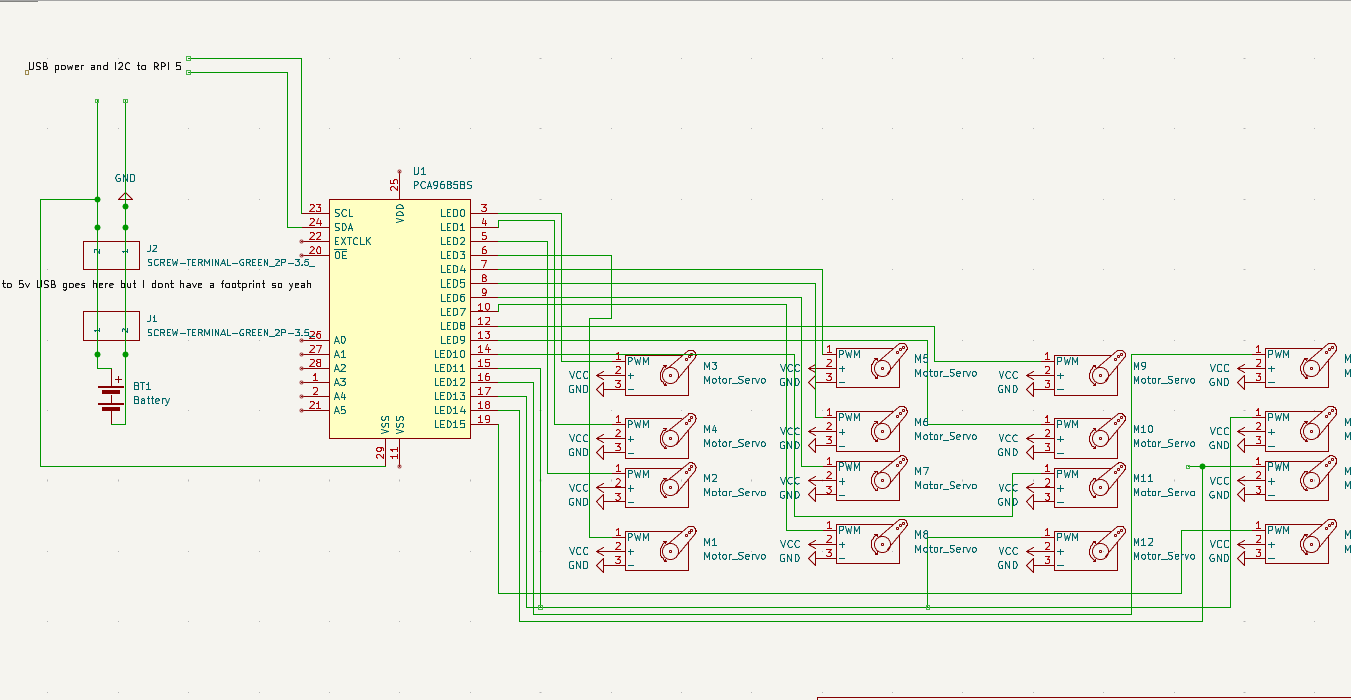
Will most likely use some form of I2C servo driver, as I will have a MINIMUM of twelve servos
Total Time Spent - 7h(i redesigned it 4 times)
May 31st: Continued Fusion Design
Changed some stuff with the model, including making it far wider
Mounted both picam holders for stereoscopic camera
Total Time Spent - 1.5h
June 1st: Finished Fusion Design
Fixed some dimensions as I had to change my battery voltage for power
Settled on a Raspi 5, this awesome power board(have worked with it before) and the PCA9685 for driving the servos
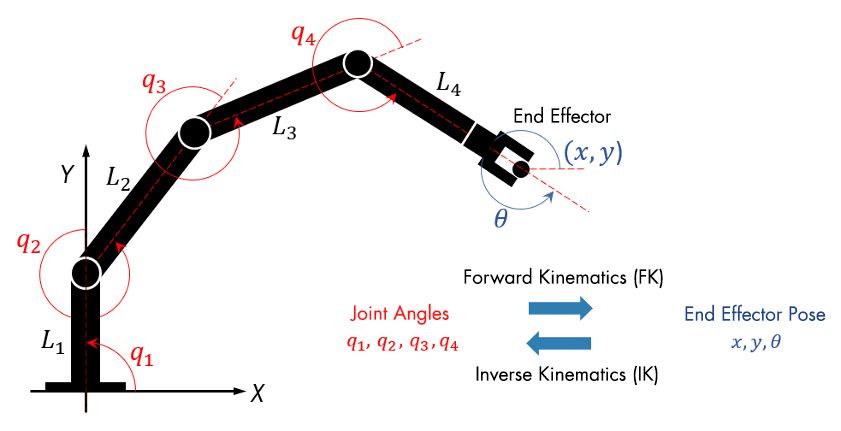
Started attempting to derive the equations for IK, as i have no idea what i'm doing when it comes to math
 Total Time Spent - 3h
Total Time Spent - 3h
June 1st(pt 2): Finished firmware
Moved all my stereo camera experiments to here and added an obstacle detector to it
Added a quadraped controller to my exisitng IK program
Did some OOP and made everything look pretty
Also made a main program for the shiggles
Also made a scrappy schematic as there is NO pcb required but ehh, schematic is required so I made it
 Now I only have to work on the 'shipping' aspect - adding more pictures, doing a readme and looking at parts sourcing
Now I only have to work on the 'shipping' aspect - adding more pictures, doing a readme and looking at parts sourcing
Should be finished by June 2nd, and then i will ship it
Total time spent - 3h + ~roughly 6h for the earlier stereo camera stuff so 9h